Установка rosa linux
Содержание:
Что это такое?
Astra Linux — операционная система специального назначения на базе ядра Linux, созданная для комплексной защиты информации и построения защищённых автоматизированных систем.
Первоначальная разработка была организована для нужд российских силовиков, спецслужб и государственных органов. Для снижения порога входимости и популяризации релиз разделили на
- Astra Linux Сommon Edition (Орёл) (актуальная версия 2.12)
- Astra Linux Special Edition (Смоленск) (актуальная версия 1.9)
Первая предназначена для рядовых пользователей и разработчиков. Вторая как раз и является «военной» ОС, соответствующей всем необходимым стандартам.
Важной особенностью Astra Linux стала защита ОС, используемых данных и программ: система обеспечивает степень защиты обрабатываемой информации до уровня государственной тайны «особой важности» включительно
То есть даже самые важные документы не утекут, что подтверждает наличие сертификата Минобороны, ФСТЭК и ФСБ России. Даже «товарищ майор» без физического контакта с компьютером ничего не получит.
Включена в Единый реестр российских программ Минкомсвязи России, поэтому может использоваться для исполнения перехода приказа о переходе на отечественный софт в коммерческих и некоммерческих организациях.
Разработчикам системы в лице АО «НПО РусБИТех» удалось, по их словам, увязать законодательные требования Российской Федерации к операционным системам с «духом и требованиям лицензии GPL».
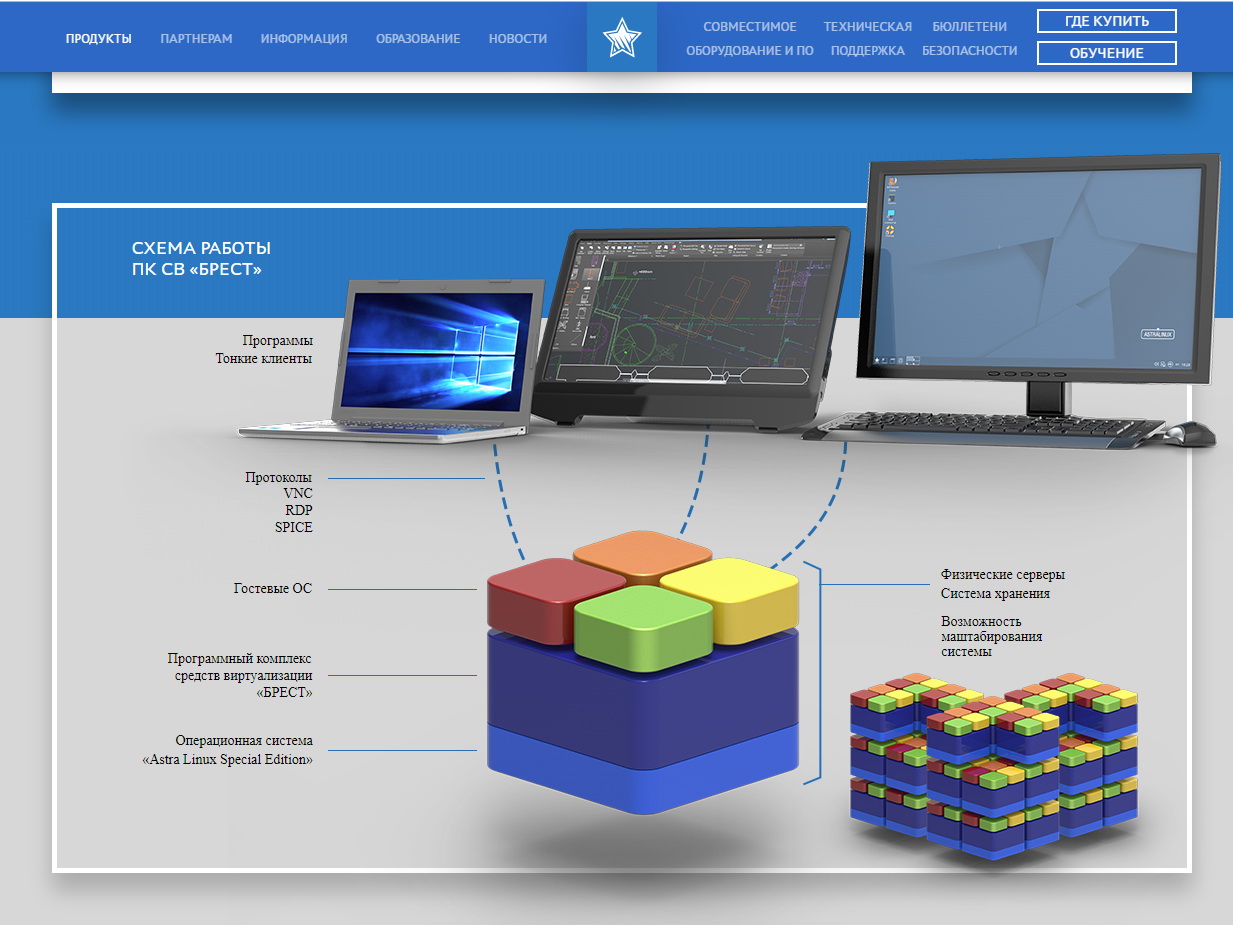 У Astra есть даже свой комплекс виртуализации. Похвально
У Astra есть даже свой комплекс виртуализации. Похвально
Astra Linux неожиданно среди массы защищенных российских дистрибутивов оказалась самой удачливой: именно она станет основной для Министерства обороны.
Первые движения начались уже в 2018: тогда военные приняли решение об отказе от Windows в пользу Astra, а в этом году появились предсерийные варианты планшетов для использования в особо ответственных задачах (об этом расскажем ниже).
2016
ROSA Desktop Fresh R8
2 августа 2016 года компания НТЦ ИТ РОСА представила дистрибутив ROSA Desktop Fresh R8.
Это финальный выпуск на платформе rosa2014.1. Обновления с устранением уязвимостей будут выпускаться ещё два года. К свободной загрузке подготовлены DVD-сборки для платформ i586 и x86_64, оформленные в вариантах с KDE 4 (2 Гб), KDE Plasma 5 (2 Гб), MATE (1.5 Гб) и GNOME (1.5 Гб).
Основные изменения
- В инсталлятор добавлена поддержка автоматического извлечения DVD после завершения установки системы, что упрощает установку в виртуальной машине;
- В архиваторе 7zip устранены проблемы с определением кодировки имён файлов в zip-архивах;
- Система обновлений доработана для предотвращения удаления пакетов при ошибках на зеркалах, когда из-за отсутствия зависимостей пользователям предлагалось удалить установленные пакеты;
- Настройки PulseAudio изменены для решения проблемы с заглушением звука других приложений при выводе уведомлений Skype;
- В OpenSSL отключена поддержка протокола SSLv2;
- Поддержка изменения разрешения экрана менеджера входа SDDM в VirtualBox;
- Утилита traceroute избавлена от suid root;
- Исправлено отключение дискретной видеокарты на гибридных системах при использовании встроенной видеокарты;
- Steam доработан для использования библиотек из репозиториев ROSA, без установки компонентов Ubuntu;
- Обновлены версии пакетов: ядро Linux 4.1.25 + доступны пакеты с ядрами 4.4.x и 4.6.x, Mesa 11.2.2 (с поддержкой OpenGL 4.1), PulseAudio 8.0, NetworkManager 1.2.2, Chromium 51.0, Firefox 46.0.1, Pale Moon 26.3.3, Thunderbird 38.6, LibreOffice 5.1.4, Qt5 5.6.1, FFmpeg 2.8.7, GStreamer 1.6.3, драйверы NVIDIA 361.42/364.15.
 Скриншот рабочего стола KDE 4, (2016)
Скриншот рабочего стола KDE 4, (2016)
ROSA Desktop Fresh R7
25 февраля 2016 года компания «НТЦ ИТ РОСА» сообщила о выпуске варианта дистрибутива ROSA Desktop Fresh R7 с десктоп-окружением GNOME 3.16.
Размер ISO-образа 1.5 ГБ (x86_64 и i586 в вариантах с UEFI и без UEFI).
 Скриншот окна GUI (2015)
Скриншот окна GUI (2015)
Особенности
- Вместо ROSA Elementary задействованы тёмные темы оформления GNOME Shell (Korora) и GTK+ (EvoPop Dark), а также новый набор значков EvoPop и новые значки для LibreOffice.
- В базовую поставку вошли
- торрент-клиент Deluge,
- звуковой редактор Audacity,
- видеоредактор OpenShot
- дополнительные мультимедиа-кодеки, включая h.265.
Из базовой поставки исключены все игры. По умолчанию в GNOME Shell отключено расширение Skype.
- Обновлены версии пакетов, в том числе задействовано ядро Linux 4.1.16 (опционально доступны сборки ядрами 4.2 и 4.3),
- включены версии X Server 1.17.4,
- Mesa 11.0.6,
- PulseAudio 7.1,
- Chromium 48.0,
- Firefox 44.0.2,
- LibreOffice 4.4.7,
- FFmpeg 2.8.5,
- GStreamer 1.6.3,
- GNOME 3.16.2,
- драйверы NVIDIA 358.16 (352.63, 340.96, 304.131),
- AMD Catalyst 15.9;
- Улучшена поддержка систем с видеокартами AMD и Intel.
- Улучшена поддержка USB-клавиатур ThinkPad.
- Изменена политика обновления ядер — теперь автоматические обновления работают только внутри одной ветки, переход на следующую ветку ядра осуществляется вручную.
- Появились образы с поддержкой UEFI для 32-разрядных систем.
Установка сторонних программ
Недавно я добавил еще один тест для дистрибутивов Линукс. Возможность
установки прикладных программ не из репозитария дистрибутива. Такая
возможность сегодня актуальна. Например браузер Google
Chrome или программа Skype
редко в каких репозитариях есть, но их можно скачать с официальных сайтов.
Итак. В Rosa Linux используются установочные
программные пакеты rpm типа. Что у меня
получилось.
Браузер Opera. Пакет в rpm
формате, скачанный с сайта Opera.com установился и
браузер работает.
Браузер Google Chrome. Пакет в
rpm формате, скачанный с сайта
Google.com установился и браузер работает. Но потребовалась установка
нескольких связанных пакетов из репозитария Росы, эти пакеты были
установлены автоматически.
Skype. Пакет в rpm
формате, скачанный с сайта Skype.com не устанавливается. Но в репозитарии Росы
есть пакет get-skype. Он устанавливается «из
коробки» и доступен через меню приложений — ярлык «Skype Install».
Запуск этого пакета устанавливает Skype и Скайп работает.
TeamViewer. У меня не получилось установить эту программу. Текущие
версии программы требуют КДЕ 5, а единственная старая, которую я нашел на их
сайте (версия 9), не работает на Росе 11.
В целом неплохо. Тест пройден. TeamViewer далеко не всем нужен и есть
альтернативы этой программе. В крайнем случае можно установить библиотеки
KDE 5.
Однако нужно иметь в виду, что проблема устаревшей версии КДЕ может
возникнуть с другими программами. Кстати, есть сборка с
KDE 5, называется Rosa Fresh Plasma 5. Обзор этой
сборки я сделаю позже.
Сопутствующие статьи
- Обзор Роса R11 KDE
4 - Обзор AlterOS 1.5.1
- Обзор Роса Линукс R7
- Обзор Альт Линукс 7
- Обзор Astra Linux 2.11
- Обзор openSUSE 12.3 Milestone Live
P.S.
Если вы живете в г. Краснодар и страстно желаете установить Роса
Linux
или просто «пощупать» ее — звоните или пишите: Подробнее…
Поделитесь этим сайтом с друзьями!
Если вам оказалась полезна или просто понравилась эта статья, тогда не стесняйтесь — поддержите материально автора. Это легко сделать закинув денежек на Яндекс Кошелек № 410011416229354. Или на телефон +7 918-16-26-331.
Даже небольшая сумма может помочь написанию новых статей 🙂
Или поделитесь ссылкой на эту статью со своими друзьями.
Управление пакетами
Программное обеспечение может управляться через Rpmdrake или из командной строки. Rpmdrake выполняет свою работу, но не настолько удобен для пользователя, как другие программы, называемые сегодня «центром приложений» или «магазином программного обеспечения». Rpmdrake организует пакеты по категориям, и вы можете ограничить поиск типами пакетов, такими как «Пакеты с графическим интерфейсом» или «Мета-пакеты». Вы можете получить больше информации об отдельном пакете, щелкнув по его имени, и вы можете выбрать пакеты для установки, установив флажок.
Поиск пакетов может быть немного сложным. Вы часто получаете очень большое количество результатов, что затрудняет поиск того, что нужно (в частности, если вы не совсем уверены в точном названии). В других случаях поиск не дал результатов — например, при поиске «password» не было найдено ни одного менеджера паролей, даже если такие приложения, как KeePassX, доступны. Я не смог найти способ поиска строк как в имени пакета, так и в описании, и выбор «Help» из меню «Help» вернул «unknown error».
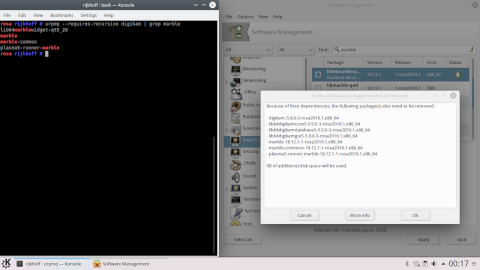
Репозитории ROSA довольно большие — любой пакет, который я хотел установить, был доступен. Хотя установка программного обеспечения работала не всегда. Например, я не смог установить VLC, потому что не удалось разрешить одну из его зависимостей и не удалось запустить браузер Tor из-за отсутствия модуля. Другое программное обеспечение будет установлено, но с неприятными сюрпризами. Когда я установил DigiKam, у меня также появилось приложение под названием Marble (я не понимаю, почему «виртуальный глобус» является зависимостью менеджера фотографий), почтовый клиент KMail имел 175 зависимостей и добавил шесть разных записей в меню приложения.
Мне было интересно управлять программами в командной строке, но там я столкнулся с другой проблемой: я понятия не имел, что использует менеджер пакетов ROSA. Дистрибутив ROSA поставляется с очень небольшим количеством документации, и, как уже отмечалось, ее веб-сайт имеет довольно ограниченный раздел на английском языке. Только после того, как у меня появилась блестящая идея проверить, какой менеджер пакетов использовал Mandriva, я узнал, что ROSA использует менеджер пакетов urpmi. Я не был знаком с urpmi, но после небольшого чтения мануалов я смог избежать Rpmdrake.
Насколько я могу судить, ROSA не поддерживает пакеты Snap и Flatpak. Я мог бы установить несколько простых пакетов AppImage, но более крупные приложения, такие как DigiKam, Geany и VLC, неизменно не запускались.
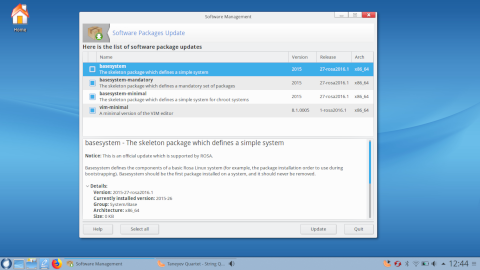
Что касается управления программным обеспечением, ROSA показывает уведомление, когда доступны обновления программного обеспечения. Обновления применяются с помощью Rpmdrake, и я не столкнулся с проблемами с обновлениями системы. Во время тестового периода я получил обновления примерно для 50 пакетов, все из которых были применены быстро и аккуратно. Приятно отметить, что Rpmdrake сообщает вам, что вы должны перезагрузить систему после обновления ядра.
ROSA использует свои собственные репозитории. Список репозиториев включает в себя репозитории «Main», «Testing», «Non-free» и «Restricted». Насколько я могу судить, ROSA использует зеркала только в России (моя система получает все свое программное обеспечение с mirror.rosalab.ru/rosa/rosa2016.1/repository/, и единственным альтернативным зеркалом, которое я смог найти, был репозиторий yandex.ru).
Установка
Не получается установить систему с USB-флэшки
- Проверьте контрольную сумму образа с помощью checkisomd5 <имяобраза>. Если проверка выдаст ошибку, скачайте образ еще раз.
- Используйте для записи флэшки программу ROSA ImageWriter, она есть под Linux, Windows и Mac
- Попробуйте другую флэшку и другой USB-порт
- Если у вас UEFI система, войдите в BIOS и переключитесь в legacy режим. Также иногда помогает обновление BIOS до последней версии.
- Если ничего не помогает, поставьте систему с DVD, записав его на второй скорости
Инсталлятор предлагает перезагрузку и автоматом форматирует в btrfs
Такое поведение иногда бывает при инсталляции в виртуальной машине или на диск без таблицы разделов.
Просто попробуйте еще раз, выбрав «Очистить весь диск» или свою разметку, ошибка больше не повторится.
Программы
В состав дистрибутива включено необходимое для большинства рядовых пользователей предустановленное программное обеспечение. В зависимости от выбранной редакции, состав программ может немного отличаться.
Для редакции KDE 4 используются следующие предустановленные приложения:
- Firefox
- LibreOffice
- LibreOffice Writer
- LibreOffice Calc
- LibreOffice Impress
- LibreOffice Draw
- LibreOffice Math
- GIMP
- Thunderbird
- Audacity
- Clementine
- Gwenview
- qBittorrent
- И другие…
В легковесной редакции LXQt программ значительно меньше. Вместо Firefox используется браузер New Moon, отличающийся низким потреблением ресурсов. В редакции XFCE предустановлен браузер Chromium.
Программы, разработанные ROSA
Разработчики создали несколько собственных программ и утилит, которые включены в состав дистрибутива. Некоторые из них основаны на других OpenSource продуктах.
- RocketBar — панель для запуска приложений.
- SimpleWelcome — лаунчер для среды KDE.
- TimeFrame — доступ к документам по дате обращения (используется наглядная временная строка).
- ROSA Media Player — видео-проигрыватель.
- ROSA ImageWriter — программа для записи ISO образа на флешку.
- ROSA Freeze — средство для заморозки состояния системы. Позволяет откатываться на предыдущее состояние системы после выполнения каких-либо административных манипуляций, например, установку программ.
Проблемы ROSA Fresh R11 KDE 4
Серьезных проблем я не обнаружил. По мелочам есть.
Традиционно, для дистрибутивов последних лет, обзор локальной сети не работает. Но
можно подключиться к другому компьютеру через прямой ввод сетевого адреса.
Расшаренные ресурсы Росы не сразу стали видны на компьютерах
Windows. А только после выключения и включения
компьютера с Росой.
Плеер Росы, кстати плеер их собственный, не может открыть некоторые файлы
через сеть (с компьютера Windows), но локально эти
же файлы он открывает.
Если на компьютере две звуковых карты — встроенная в материнскую плату и
HDMI на видеокарте, тогда звук «раздваивается». Системные звуки
выводятся на HDMI, а звук от
воспроизведения видео или аудио уходит на встроенную звуковую карту. И это
может сбить с толку, проверяешь звук и он есть, но когда включаешь видео звука нет.
Для решения проблемы нужно в настройках звука, вручную переключаться на
HDMI.

Апплет настроек дисплея не дает настроек по подключению через
HDMI, пустая вкладка:
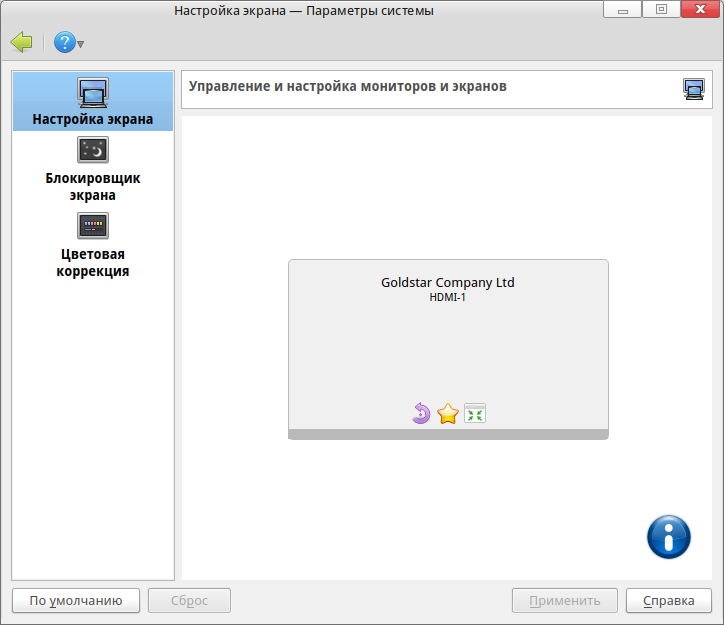
Но, автоматически, разрешение устанавливает правильно, в отличии от
Альт Линукс 8.2, который с HDMI, похоже совсем не
дружит.
Rosa Linux R11 и локальная сеть с Windows
Все дистрибутивы я тестирую на возможность работы в гетерогенной
локальной сети (в сети где есть компьютеры Linux и Windows).
К компьютерам Windows мне удалось подключиться. Обзор сети в файловом
менеджере не работает, но это сейчас во всех новых версиях всех
дистрибутивов. Пришлось писать сетевой адрес вручную и Rosa Linux нормально подключился к компьютерам Windows.
Однако для разных версий Windows адрес нужно писать по разному.
Для подключения к Windows XP достаточно указать
имя или адрес — smb://compname. А для подключения
к Windows 7 нужно указывать имя пользователя и сетевую папку —
smb://username@compname/shared-folder/. Если написать обычный адрес, будет
ошибка соединения. Почему разработчики дистрибутива допустили
такой разнобой, я не знаю. Для сравнения, Ubuntu к
разным версиям Windows подключается одинаково — smb://compname.
Раздать файлы с Rosa Linux тоже удалось. Сервер Samba был установлен «из
коробки», GUI интуитивно понятен — вкладка в свойствах папки (в
файловом менеджере). Но Windows 7 «не видит» компьютер с Росой с своем
обозревателе сети. Однако возможно подключиться к Росе по
IP-адресу.
Ошибка при работе с сетевыми файлами
Если в Долфин открыть (одновременно или последовательно) несколько разных
папок и файлов на компьютере (или компьютерах) Windows, тогда возникает
ошибка доступа к сетевым данным. При открытии или сохранении открытого
файла, Долфин выдает непрерывные запросы на авторизацию. Таким образом
сохранить открытый сетевой файл не удается. Эту ошибку можно победить, если
удалить все сетевые пароли в kwalletmanager. После удаления, Долфин выдает
запрос на сетевую авторизацию и эта авторизация проходит нормально.
Alt Linux
Альт 8 СП – дистрибутив операционной системы для серверов и рабочих станций со встроенными программными средствами защиты информации, сертифицированный ФСТЭК России.
Дистрибутив выпускается для следующих аппаратных платформ:
- Intel i586/x86_64;
- Эльбрус-4С/8С.
Если с Intel всё понятно, то что за зверь этот Эльбрус? 4С — четырёхъядерный процессор, работающий на частоте 800 МГц, который поддерживает работу с тремя каналами памяти. Также имеется кэш-память общим объёмом 8 МБ. Процессор произведён по технологии 65 нанометров, со средним энергопотреблением в 45 Ватт. Да-да, ещё одна отечественная разработка!
Кстати, мы проводили кросс-тестирование совместимости и подтверждаем полную совместимость доступных дистрибутивов ALT Linux с FastReport VCL (при разработке приложений на Lazarus) и FastReport Mono. Если ещё в 2018 году пользователи могли столкнуться с некоторыми несовместимостями, например, при формировании PDF, то на сегодня проведена большая работа по исправлению возможных “шероховатостей” (в частности, улучшен механизм включения и подстановки шрифтов в формируемые FastReport PDF-документы).
Но вернёмся к Альт.
Создатель этой ОС – компания «Базальт СПО», которая ориентировалась на создание своего дистрибутива, как один из вариантов “очень защищённой” ОС.
Сегодня ALT Linux Team поддерживает собственный репозиторий Sisyphus, который содержит RPM-пакеты собственной сборки и является отдельной ветвью развития Linux, не базируясь ни на каком крупном дистрибутиве.
Рабочее окружение основано на Mate, что является плюсом для людей со слабым железом. Внешний вид системы приближен к Windows XP. На мой взгляд это больше достоинство, чем недостаток, ведь мы все помним горячо любимую Windows XP.
Интересной особенностью всех ALT-систем является то, что, не смотря на формат пакетов RPM в качестве пакетного менеджера используется APT. Отлично работает классический apt-get, но современный apt не поддерживается в качестве графической оболочки используется Synaptic.
Теперь о минусах. При установке нам предлагаются достаточно интересные пресеты, один из них — поддержка стороннего ПО – это ок, другой — поддержка Windows. Если у кого-то промелькнёт мысль, что пакеты с поддержкой Windows можно будет доставить позже, то нет, позже сделать это будет нельзя. Подход достаточно странный, не сказать, что он критично на что-то влияет, но осадок неприятный остался. А так, чтобы установить рабочий экземпляр Wine нам потребуется открыть консоль и обратиться конечно же к документации.
А если официальные бумаги не особо помогли, то Альт имеет самое большое сообщество, богатую историю, и качественную поддержку. Кроме того, у них хорошо проработанная документация по продуктам, большое количество мануалов, много детализированных сценариев использования.
Отмечу, что дистрибутив Альт, по сравнению с ОС РОСА и Astra Linux, далеко ушёл от базового. Astra — это видоизменённый существующий дистрибутив, АСТРА — это Debian, а РОСА — Mandriva. А у Альта изначально был Mandrake, но разработчик настолько его изменил, что базовый дистрибутив уже не разглядеть.
Системные требования:
- Оперативная память: от 1 Гб, рекомендуется 8 и больше Гб (а для виртуализации рекомендуется не менее 16 Гб ОЗУ и двухпроцессорная система или лучше);
- Жёсткий диск: от 32 Гб, рекомендуется 200+ Гб (для всё той же виртуализации рекомендуется аппаратный RAID-контроллер);
- Сеть: порт Ethernet;
- Периферийное оборудование: стандартное, есть возможность использовать без монитора.
Комьюнити-релизы ROSA Marathon
| • Краткое описание ROSA LXDE 2012 LTS |
| • Краткое описание ROSA Marathon 2012 GNOME Edition |
|
Версия 64-бит Вышла: 7 августа 2012 |
Версия 64-бит Вышла: 20 июня 2012 |
| • Обзор релиза ROSA Desktop 2011 Extended Edition |
| • Обзор релиза ROSA Desktop 2011 |
| • 2011.0 Errata |
| • Список известных проблем в ROSA Desktop 2011 |
|
32 бит Дата выхода: 23-Dec-2011 64 бит Дата выхода: 23-Dec-2011 32 бит Дата выхода: 28-Aug-2011 64 бит Дата выхода: 28-Aug-2011 |
| • Обзор релиза ПСПО6 |
| • Список известных проблем в ПСПО6 |
|
32 бит Дата выхода: 31.01.2012 |
Релизы ROSA Desktop 2011 GE (Gnome Edition) выпускаятся сообществом пользователей РОСА.
Простая установка
Для установки операционной системы ROSA Linux нужно подготовить компьютер, выбрать и скачать образ, записать его на USB-накопитель («флэшку») или диск DVD и, наконец, установить систему. Все это не так сложно и, если ваш компьютер окажется хорошо совместимым с ROSA Linux, даже начинающий пользователь может справиться с установкой.
Примечание
Очень и очень рекомендуется перед началом такой важной операции, как установка ОС, сделать резервную копию важных файлов на вашем компьютере.
Подготовка компьютера
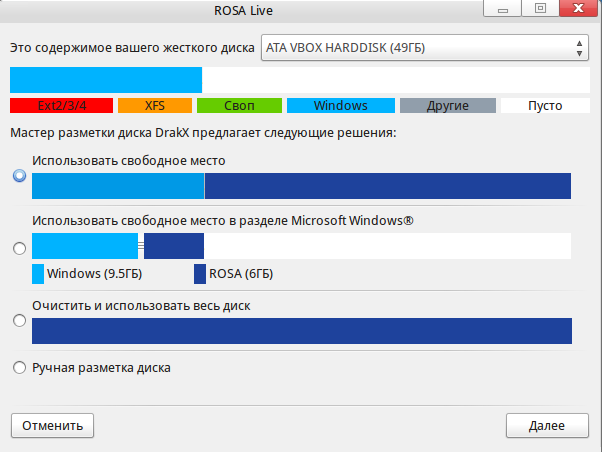
Проще всего ставить ROSA Linux на пустой диск или с удалением всей информации на диске. Но такой вариант не слишком удобен — скорее всего у вас есть важные документы или фотографии, а может быть вы хотите сохранить Windows или другую систему рядом с ROSA Linux, чтоб иметь возможность работать и там, и там.
Если у вас уже установлена другая система и вы хотите сохранить её, возможно понадобиться расчистить свободное место для нашего линукса. Мы рекомендуем использовать те инструменты, что встроены в вашу, уже установленную систему для изменения разделов на диске так, чтоб осталось свободное, неразмеченное место объемом не менее 20 ГиБ. Инсталлятор ROSA Linux и сам это умеет делать, но обычно любая система обрабатывает свои разделы наиболее корректно. Также, если вы используете последние версии Windows, рекомендуется отключить в них технологию «быстрого старта» командой
powercfg -h off
Примечание
Рекомендуется делать установку на компьютере, подключенном к сети Интернет с помощью кабеля. Это позволит инсталлятору автоматически определить ответы на большинство вопросов и сделает возможным установку драйверов для wifi (если они сразу не определятся)
Выбор образа и окружения рабочего стола
Актуальные образы ROSA
- ROSA Desktop Fresh R11 — первый релиз платформы 2016.1, который будет поддерживаться 4 года, в соответствии с политикой выпуска, до окончания разработки новой платформы 2018.1. R9 отличается новыми версиями программ и рекомендуется прежде всего для энтузиастов.
- ROSA Desktop Fresh R8.1 — Для пользователей, предпочитающих стабильность.
Окружения рабочего стола
В отличие от Windows, в ROSA Linux вы можете выбрать различные оболочки-окружения рабочего стола по своему вкусу и скачать образ с ними.
Доступные окружения рабочего стола:
Дистрибутив ROSA R8
-
-
- ~ KDE4 R8.1 ~:::~GNOME_R8 ~:::~ PLASMA_R8~:::~MATE_R8~
-
Дистрибутив ROSA R9
-
-
- ~ KDE4 R9 ~:::~GNOME R9 ~:::~ PLASMA R9~:::~LXQt_R9~
-
Также доступны две архитектуры — i586 и x64, соответственно — 32-разрядная и 64-разрядная.
64-разрядная использует значительно больше оперативной памяти но работает несколько быстрее, 32-разрядные программы, например skype или steam в 64-разрядной системе работают нормально. Также нужно учитывать, что некоторые программы, например viber или WarThunder доступны только в 64-разрядном исполнении а значит для них нужна 64 разрядная система. Современные компьютеры также используют технологию UEFI.
Вкратце, если у вас современный компьютер с более чем 2 Гиб памяти, то выбирайте образ x64UEFI, если же памяти 1 или 2 Гиб — 32-разрядную архитектуру i586.
Примечание
Вы можете оценить, как будет работать на вашем компьютере выбранный вами образ ROSA Linux и без установки, для этого нужно загрузиться в Live-режиме, выбрав в меню загрузки Start ROSA Desktop
Запись образа на USB-накопитель и загрузка с него
Чаще всего ROSA Linux устанавливают на компьютер с помощью USB-накопителя. Для установки вам понадобится флэшка объемом 4ГиБ или более и программа ROSA ImageWriter. Выберите в этой программе вашу флэшку и выбранный вами образ и нажмите «Записать»
Теперь вам нужно перезагрузиться с флэшки. Обычно для этого нужно выбрать порядок перезагрузки в BIOS вашего компьютера. Как это сделать зависит от конкретной модели компьютера и описано в его документации, часто для этого используются нажатие клавиш F12 или F2 в самом начале загрузки.
Если вы расчистили перед установкой место для ROSA Linux, выберите в инсталляторе установку на свободное место.
Большинство вопросов, возникающих при установке, может быть разрешено с помощью Errata
Установка
Первым препятствием, которое мне пришлось преодолеть, была загрузка ISO-образа. ROSA родом из России, и когда я впервые посетил , я обнаружил, что раздел сайта на английском языке довольно ограничен. Например, на главной странице редакции home показаны примечания к выпуску старых выпусков ROSA (R8 и R9), а ссылка на скачивание привела меня на страницу, написанную на русском языке. К счастью, названия доступных настольных сред на странице загрузки приведены на английском языке, поэтому получить правильный образ ISO не так уж сложно.
Примерно в середине процесса я наткнулся на отдельный домен ROSA для англоязычного рынка: . Раздел загрузок для этого домена на английском языке, но в нем нет ROSA Fresh R11 (самая последняя версия — R10). Точно так же самая последняя новостная статья относится к декабрю 2017 года. Похоже, что веб-сайт больше не поддерживается (что также может объяснить, почему домен не имеет сертификата SSL).
ROSA предлагает ISO-образы для четырех разных сред рабочего стола, и для каждой версии вы можете загрузить 32- или 64-битный образ. Интересно отметить, что первой в списке средой рабочего стола является KDE4 (последний стабильный выпуск которой состоялся в августе 2015 года). Далее следует KDE Plasma, за которым следуют LXQt и Xfce.
Я выбрал 64-битный ISO-образ с Plasma , размер которого составляет 2,2 ГБ. Загрузка с ISO-образа предоставляет вам графическое меню загрузки, в котором первый вариант — «Boot from local drive». Эта опция пытается загрузить операционную систему, установленную на вашем компьютере, что в моем случае привело к ошибке «boot failed». Кажется странным, что по умолчанию не загружается ROSA — при загрузке с ISO вы, вероятно, хотите протестировать и/или установить образ.
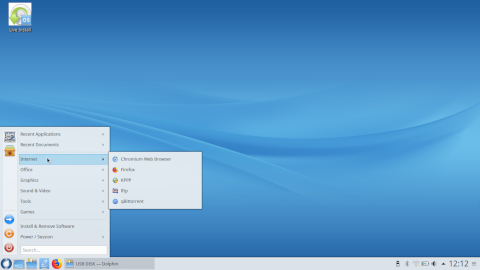
После перезагрузки моего ноутбука я попытался запустить ROSA в live-сессии. Все сработало, как и ожидалось, и мне очень нравится собственная тема ROSA («ROSA Desktop Fresh»). Она чистая и несколько традиционная, с единственной панелью внизу экрана. Меню приложений можно запустить, щелкнув логотип ROSA на панели или нажав клавишу super. Само меню выводит список приложений в традиционном дереве и включает поле поиска, которое автоматически получает фокус (так что вы можете сразу начать поиск в меню).
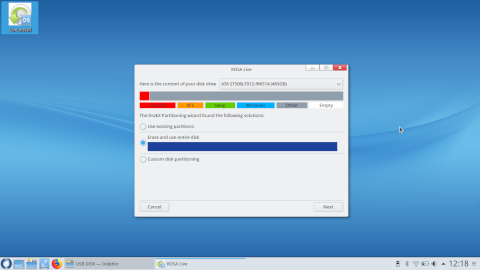
Установщик может быть запущен изнутри live-сессии. Первым шагом является разбиение жесткого диска (возможно, лучше всего сначала сделать самую страшную часть). Вы можете использовать существующие разделы, позволить ROSA захватить весь диск или создать пользовательские разделы. Когда вы разрешите ROSA забрать весь диск, вы получите раздел подкачки (4 ГБ, в моем случае), корневой раздел 20 ГБ и домашний раздел, занимающий оставшееся пространство. И корневой, и домашний разделы используют файловую систему ext4.
Когда я впервые установил ROSA, я не заметил, что опция шифрования жесткого диска доступна только при создании пользовательских разделов. Поскольку я устанавливал ROSA на ноутбуке, я хотел использовать шифрование, и поэтому я переустановил ROSA вскоре после завершения установки. Настраиваемое разбиение было интуитивно довольно понятным: я мог создать загрузочный раздел и физический том LVM, в котором я мог бы настроить раздел подкачки и разделы XFS для корневого и домашнего разделов.
После создания разделов ROSA начинает копирование файлов на жесткий диск. Пока установщик занят, вы можете посмотреть несколько слайдов. Большинство дистрибутивов используют такие слайды, чтобы сообщить новым пользователям, где найти помощь или какие приложения они могут захотеть установить, но ROSA просто отображает лозунги, такие как «A Russian Linux developer company» и «Russian distro of European origin».
Затем вам нужно выбрать, куда вы хотите установить загрузчик (опция по умолчанию, вероятно, будет правильной) и установить количество секунд, по истечении которых будет загружаться образ по умолчанию (по умолчанию — пять). На остальных экранах вы устанавливаете пароль root, создаете учетную запись пользователя и выбираете, хотите ли вы включить CUPS, Samba и SSH. Я обнаружил, что установщик имеет хороший баланс между простотой и предложением различных расширенных возможностей.